关于高级辅助驾驶系统 ADAS
[TOC]
感知、高精地图和驾驶决策是自动驾驶的三大支柱。需技术、立法、产业化同时推动。
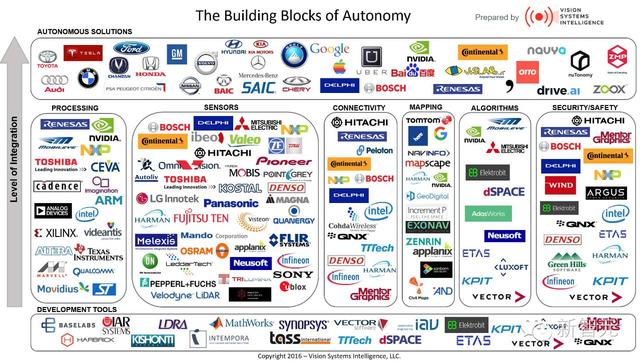
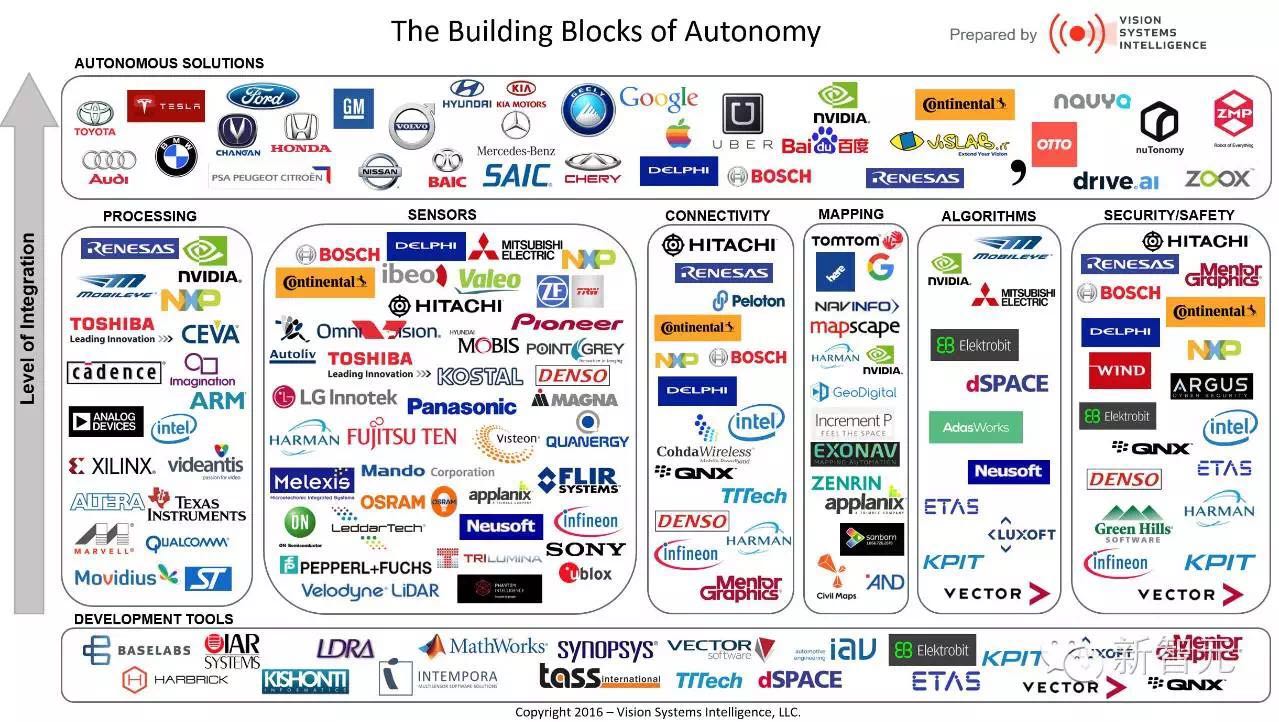
2016 版图
技术研究公司 VSI(Vision Systems Intelligence)发布的自动驾驶产业布局图。
{kind=link}
开源代码
| 说明 | ||
|---|---|---|
| openpilot | comma.ai开源的汽车辅助驾驶源码 | |
厂商
各类企业优势:
- 科技型公司,数据融合、高精度地图技术优势,吸引消费者和资本市场关注;
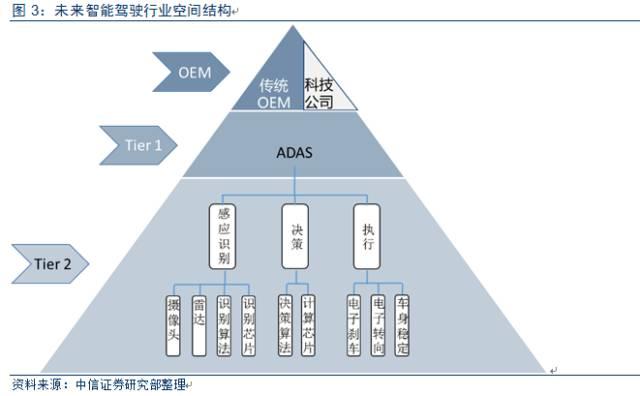
- 传统车企(OEM),掌握汽车生产资质和整车控制集成的核心竞争力,保留全产业链优势;
- ADAS供应商,掌握感知识别算法,为车企和科技型公司提供ADAS系统解决方案;
- 底层零部件供应商,如雷达、摄像头、芯片、电子刹车等。
代表
科技型公司
特斯拉、阿里( yunOS for Car)、谷歌、苹果、BAT、Uber
传统车企(OEM)
- 奥迪、宝马、奔驰、沃尔沃、丰田、马自达、福特等
通用、菲亚特克莱斯勒、本田、日产、三菱、富士重工业、现代、起亚、戴姆勒、大众、保时捷、玛莎拉蒂、捷豹路虎、特斯拉
上汽 智能互联 SUV RX5、智能驾驶汽车 MG iGS,长安 智能互联 SUV CS95
ADAS供应商
Bosch、AutonomousStaff、Autoliy
和谐富腾、小鹏、蔚来、智车优行、乐视
底层零部件供应商
传感层:
- 摄像头:Omni、PointGrey、大恒和微视
- 雷达:Bosch、Denso、Delphi、博世、大陆、德尔福、电装、Velodyne、IBEO
控制层:
- 芯片/软件:Mobileye、TI(德州仪器)、ADI、东芝、ST、飞思卡尔、NVIDIA
- 集成控制:博世、大陆、德尔福、电装、Mobileye
机器视觉算法:中科慧眼、地平线、东软和Minieye
高精地图:HERE、TOMTOM、RoadDNA、RoadBook、百度、高德、四维图新、武汉光庭
执行层
- ESP/AEB/ABS等:博世、大陆、德尔福、电装
市场进度
模块化 ADAS 是传统汽车向无人驾驶进发的重要方式。

责权问题
智能驾驶按照汽车控制权及安全责任分配可分为不同级别。
美国机构有:国际自动机械工程师学会(SAE)、 美国国家公路交通安全管理局(NHTSA)和美国高速研究所(BASt);中国机构 C-NCAP。
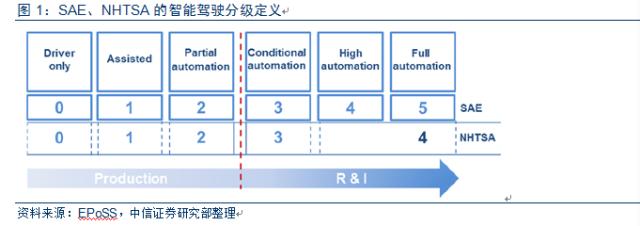
根据国际自动机械工程师学会(SAE)来分:
| 级别 | ||
|---|---|---|
| 0 | 完全手动驾驶 | |
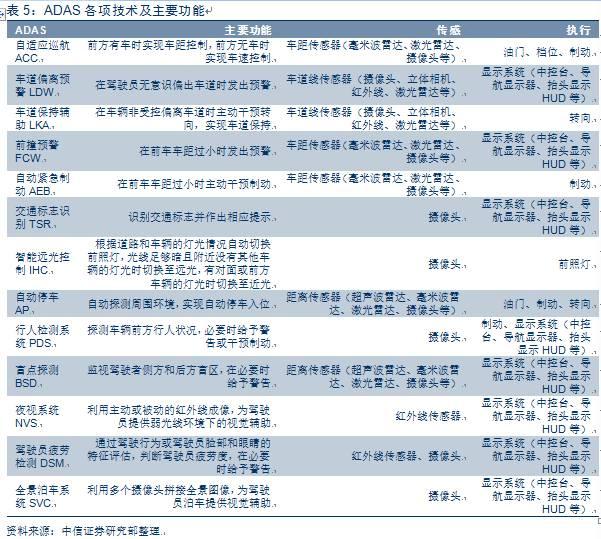
| 1 | 辅助驾驶(警告提示类) | 车道偏离预警LDW、前撞预警FCW、后视系统RVS、行人监测系统PDS、盲点监测BSD、环视系统SVC、交通标示识别TSR等 |
| 2 | 部分模块自动化(干预辅助类) | 自适应巡航ACC、车道保持辅助LKA、紧急自动刹车AEB、智能远光灯IHC、自动泊车AP等 |
| 3 | 特定条件下自动化(综合功能) | 丰田的公路自动驾驶辅助AHAC、特斯拉的自动巡航Autopilot、通用的Super Cruise |
| 4 | 高度自动化 | 奔驰概念车 F015 Luxuryin Motion,配备车联网、行人检测、自动紧急制动等功能 |
| 5 | 全自动化的无人驾驶 |
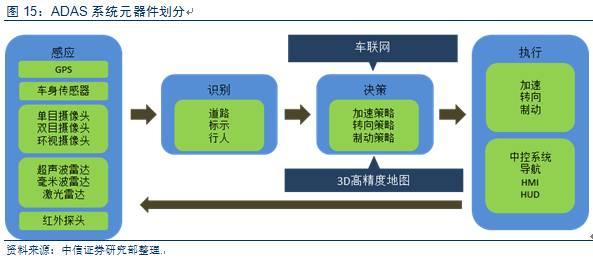
元器件
感知识别(主要为摄像头和雷达)和高精度地图系统。
关键技术
ADAS技术基础是计算机视觉。
行动层
- 转向、油门和制动三大控制器(及执行机构):根据ECU输出讯号,让汽车完成动作之行
感知层
- 联网:车辆间以及车辆与基础设施间的互联网连接(数据云)
- 地图:存储和更新地理及基础设施信息
- 处理器(ECU/MCU):处理决策所需的数据
- 感知单元:感知外部数据。包括毫米波雷达、激光雷达、摄像头、超声波雷达等
- 执行机构:根据计算结果快速动作。包括制动系统等
认知层
认知层主要是智能决策和规划,难点在于:对环境的准确理解、对下一步决策的准确判断、选择合理的路径达到目标。
- 程序算法:深度学习,计算机视觉和深度神经网络(DNN)管道
- 电子控制单元(ECU)
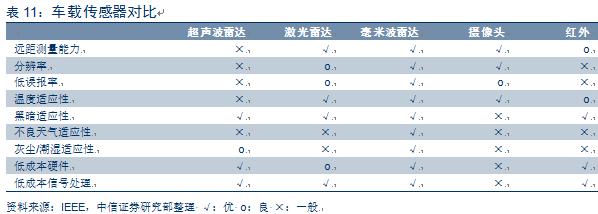
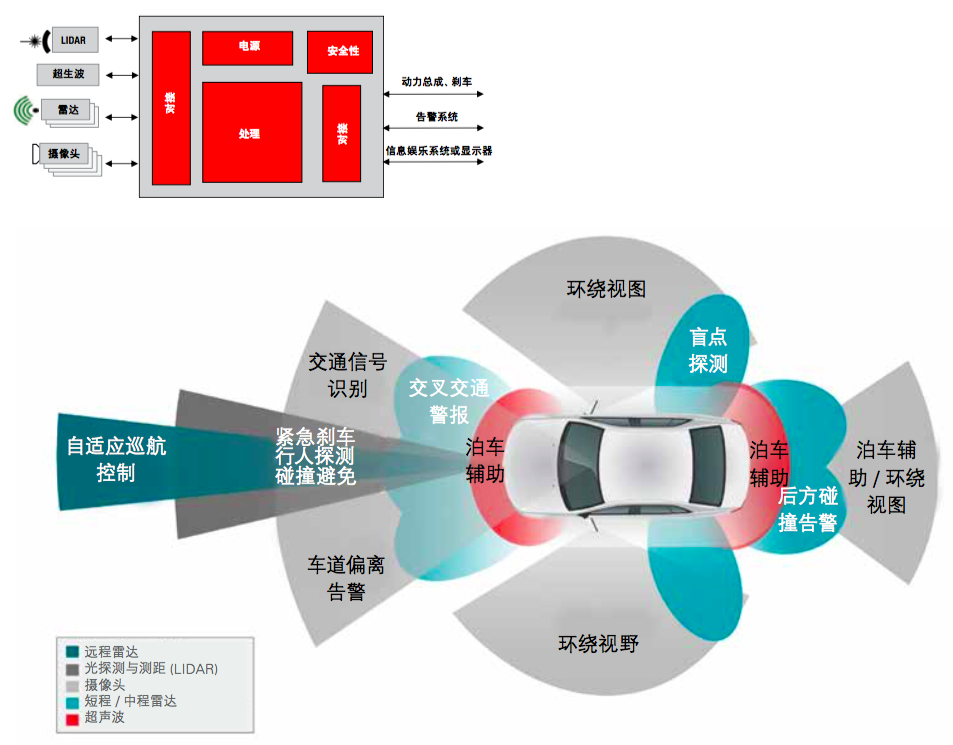
感知单元
雷达和摄像头会成为传感器主流,呈现多传感器融合趋势。
基于摄像头的系统
单车保守用4个镜头(前置摄像+两侧盲点监测+后侧倒车影像)
使用范围:后备摄像头和环视系统等,驾驶员瞌睡告警、车道偏离告警和碰撞避免。
| 位置 | 应用 | |
|---|---|---|
| 单目摄像头 | 前挡风玻璃上部 | 自适应巡航、车道偏离预警、前撞预警、行人监测 |
| 后视摄像头 | 车尾 | 倒车可视系统 |
| 立体摄像头(双目摄像头) | ||
| 环视摄像头 | 一般至少四个,分贝安装在车前后左右 | 自动泊车、全景泊车 |
基于雷达的系统
目前主流车载传感器包括超声波雷达、激光雷达、毫米波雷达等
| 位置 | 应用 | |
|---|---|---|
| 远程雷达系统(77GHz) | 一般安装在车辆前部,侦测正前方。探测距离超过 100 米 | 车辆测距。通常用于自适应巡航控制、刹车辅助和碰撞告警 |
| 中程/近程雷达系统(24GHz) | 短距车载雷达业务。盲点检测、侧面碰撞告警、两侧来车告警和变道辅助 | |
| 光探测和测距(LIDAR) | 自适应巡航控制、事故避让与缓解以及目标探测。它对自主驾驶功能十分重要 | |
| 超声波雷达 | 用于泊车辅助已达到很高成熟度并为市场所广泛接受。片上系统是超声波传感器优选解决方案。 | |
| 毫米波雷达 | 一般多个雷达组合 | 车在距离探测,如自适应巡航、碰撞预警、盲区探测等 |
| 激光雷达 | 实施环境感知,三维建模 |
传感器融合
参考
- KITTI:一个测试交通场景中车辆检测,车辆追踪,语义分割等算法的公开数据集。现在测试自动驾驶等车辆识别算法的,都用这个数据集。
- 抢食互联网汽车螃蟹,阿里YunOS向左,安卓向右
- 什么是互联网汽车?:上汽荣威 RX5 微信广告
- 无人驾驶国标框架已制定完成:尽量避免对具体技术方案设限
- 深度2016-2025 ADAS 技术及市场趋势报告
- 报告│48张PPT看懂驾驶辅助系统(ADAS)市场现状
- 【智驾深谈】Mobileye,用单目视觉点亮自动驾驶